Currently, drones can fly in controlled, windless conditions or be operated by humans using remote controls. Drones yes were taught to fly in formation in the open sky, but those flights were often performed under ideal conditions and circumstances.
However, in order for a drone to be able to automatically perform essential but routine tasks, such as delivering or transporting a driver injured in a traffic accident, the drone must be able to do so. ability to adapt to wind conditions in real time — roll with punches, meteorologically speaking.
To face this challenge, a team of engineers from Caltech developed Neural-Fly, a deep learning method that can help drones deal with new and unknown wind conditions in real-time only. by updating a few key parameters.
Neural-Fly is described in a study published in Robotics Science. The respective author is Soon-Jo Chung, Bren Professor of Aerospace and Control and Propulsion Systems and Jet Propulsion Laboratory Research Scientist. Caltech graduate students Michael O’Connell (MS ’18) and Guanya Shi were the first coauthors.
Neural-Fly tested at Caltech’s Autonomous Systems and Technology Center (CAST) using its Real Weather Wind Tunnel, a custom 10-foot x 10-foot array of more than 1,200 small computer-controlled fans that allows engineers to simulate everything from light gusts to strong winds.
“The problem is that the direct and specific influence of different wind conditions on aircraft dynamics, performance and stability cannot be accurately described as a simple mathematical model,” says Chung. . “Rather than trying to qualify and quantify each impact of the turbulent and unpredictable wind conditions we often encounter when traveling by air, we instead use the The combination of deep learning and adaptive control allows the aircraft to learn from previous experiences and adapt to flying conditions with stable and robust assurance. ”
O’Connell adds: “We have a lot of different models rooted in fluid mechanics, but getting the right model fidelity and tailoring that model to each vehicle type, wind conditions, etc. and operating mode is a challenge. On the other hand, existing machine learning methods require huge amounts of data to train but are not suitable for modern flight performance achieved by classical physics-based methods. Furthermore, tuning an entire deep neural network in real time is a huge, if not impossible, task today. ”

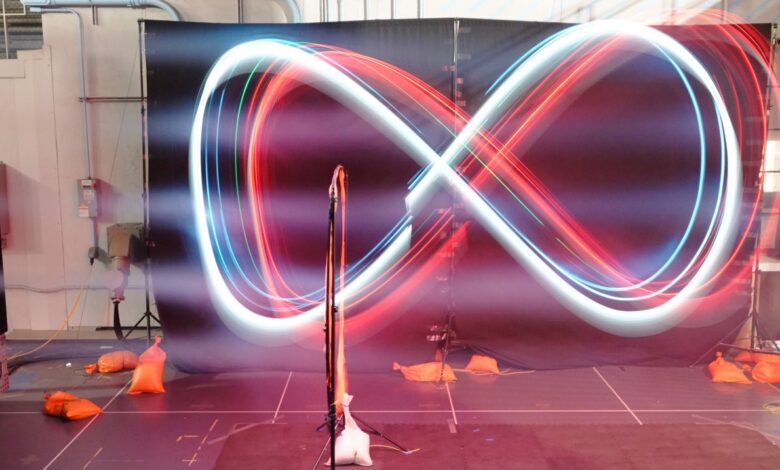
This time-lapse photo shows a Neural-Fly-equipped drone maintaining a figure-eight cruise amid strong winds at Caltech’s Real Weather Wind Tunnel.
Neural-Fly, the researchers say, overcomes these challenges using a so-called isolation strategy, through which only a few parameters of the neural network must be updated in real time. .
“This is achieved thanks to our new meta-learning algorithm, which pre-trains the neural network so that only these important parameters need to be updated to effectively capture the changing environment,” says Shi.
After collecting at least 12 minutes of flight data, autonomous quadrotor drones equipped with Neural-Fly learn to respond well to strong winds so that their performance is significantly improved (as measured by their ability to fly). ability to accurately track the flight path). That flight-path error rate is about 2.5 to 4 times smaller than modern drones equipped with the same adaptive control algorithms to identify and respond to atmospheric effects. kinematics but without deep neural networks.
Neural-Fly, developed in partnership with Caltech Yisong YueProfessor of Computer Science and Mathematics, and Anima AnandkumarProfessor of Computer Science and Mathematics Bren, based on earlier systems known as Neural-Lander and Neural-Swarm. Neural-Lander also uses deep learning to track the drone’s position and speed as it lands and modify the landing trajectory and propeller speed to compensate for propeller bounce. from the ground and achieve the smoothest possible landing; Neural-Swarm has taught drones to fly autonomously in close proximity to each other.
Although landing may seem more complicated than flying, Neural-Fly, unlike previous systems, can learn in real time. Therefore, it can react to wind changes on the fly and it does not need to be adjusted after the fact. Neural-Fly also performed well in flight tests conducted outside of the CAST facility as well as in wind tunnels. Furthermore, the team has shown that flight data collected by an individual drone can be transferred to another drone, building a storehouse of knowledge for other drones. self-propelled facility.
At the CAST Real Weather Wind Tunnel, test drones were tasked with flying in a pre-described figure 8 pattern while they were blown with winds of up to 12.1 meters per second — approximately 27 miles per hour, or six on the Beaufort scale of wind speed. This is classified as a “strong wind”, where umbrellas are difficult to use. It is rated right under “moderate gusts”, where it will be difficult to move and entire trees will sway. This wind speed is twice as fast as that experienced by drones during neural network training, which shows that Neural-Fly can extrapolate and generalize well to hard-to-see and weather weather. harsher.
The drone is equipped with a standard flight control computer, which is popularly used by the drone research and hobbyist community. Neural-Fly was implemented in an integrated Raspberry Pi 4 computer about the size of a credit card and retailed for about $20.
Written by Robert Perkins
The source: Caltech




